ICSI Intelligent cooperative sensing for improved traffic efficiency. Duración: Octubre/2013-Abril/2015 Presupuesto: Descripción y objetivos: Dentro del proyecto ICSI se desarrolló y desplegó una red cooperativa vehicular con capacidad de sensorización y proceso de datos distribuida para la difusión de información [...]
Proyecto SEGVAUTO II
Factor humano y HMI, Posicionamiento y mapas digitales, Sensores, Sistemas de asistencia, UEM, Vehículo conectado
SEGVAUTO II Seguridad de Vehículos Automóviles Duración: 01/2010 - 12/2013 Presupuesto: Objetivos: El objetivo fundamental del programa es el diseño de sistemas para la seguridad en vehículos, incluyendo desde una metodología adecuada de recogida de datos, análisis y reconstrucción de [...]
Proyecto Sistema Inteligente de Bajo Coste para el Transporte y la Vigilancia en Entornos Ecológicos no Estructurados
Posicionamiento y mapas digitales, Sensores, ULL, Vehículo autónomo, Vehículo conectado
Sistema Inteligente de Bajo Coste para el Transporte y la Vigilancia en Entornos Ecológicos no Estructurados Duración: 12/2007 - 09/2010 Presupuesto: 90.000,00 € Objetivos: Se plantea la construcción de un prototipo de vehículo autonomo para la circulación en entornos no estructurados, [...]
Proyecto CONTRAINCENDIA I
ULL, Vehículo conectado
"CONTRAINCENDIA I" Duración: 12/2007 - 10/2010 Presupuesto: 138.996,09 € Objetivos: Construcción de redes de sensores para la detección de incendios en zonas de accesibilidad reducida. Financiadores: Entidad financiadora: Consejería de Empleo, Industria y Comercio, Gob. de Canarias [...]
Proyecto Plataforma de bajo coste para la simulación a escala de vehículos eléctricos inteligentes y soluciones de sistema de transporte inteligente
Posicionamiento y mapas digitales, Sensores, Simulacion, ULPGC, Vehículo autónomo, Vehículo conectado
Plataforma de bajo coste para la simulación a escala de vehículos eléctricos inteligentes y soluciones de sistema de transporte inteligente Duración: 01/2010 - 12/2010 Presupuesto: 60.500,00 € Objetivos: Desarrollar una plataforma HW/SW escalando un vehículo eléctrico dotada de la electrónica y [...]
Proyecto SCICLO
Posicionamiento y mapas digitales, UPCT, Vehículo conectado
Sistemas Cooperativos ITS para Usuarios Vulnerables en Vehículos de Dos Ruedas Duración: 01/2016 - 12/2016 Presupuesto: Objetivos: El proyecto se centra en el ámbito de los usuarios vulnerables, ya que la mortalidad de los peatones, usuarios de motocicletas y, sobre [...]
Proyecto Infraestructura de Servicios Ubicuos y de Comunicaciones en Redes Vehiculares
Posicionamiento y mapas digitales, UPCT, Vehículo conectado
Infraestructura de Servicios Ubicuos y de Comunicaciones en Redes Vehiculares Duración: 01/2009 - 12/2011 Presupuesto: Objetivos: Servicios ubicuos y de comunicación a bordo de vehículos y redes V2V Participantes: Rafael Toledo en la Universidad de Murcia, UPV Financiadores: [...]
{kind=link}
{kind=link}
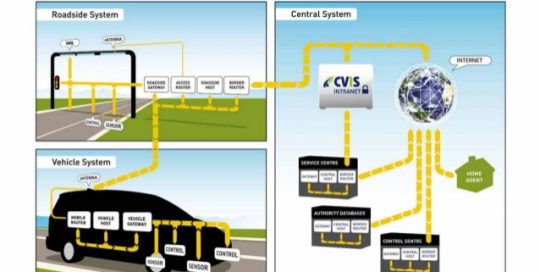
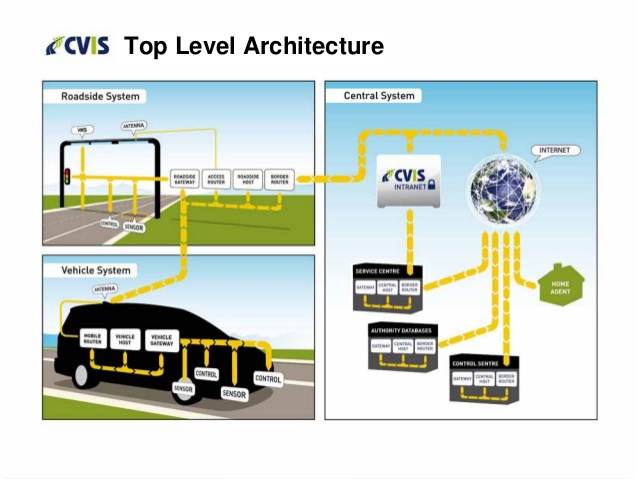
Proyecto CVIS
Sensores, Tráfico, UPCT, Vehículo conectado
Cooperative Vehicle Infrastructure Systems Duración: 01/2010 - 02/2016 Presupuesto: Objetivos: Cooperative Vehile Infrastructure Systems afrontaba la cooperación entre vehículos y con la insfraestructura Participantes: De la red, Rafael Toledo en el Laboratoire Central des Ponts et Chaussées (ahora IFSTTAR Institut [...]
Proyecto DECAUTO
CSIC, Sistemas de asistencia, Vehículo autónomo, Vehículo conectado
Demostración de guiado automático de vehículos en trayectos interurbanos Duración: 2012 Presupuesto: 27.000 € Objetivos: Demostrar la viabilidad de un sistema de guiado para vehículos en condiciones reales de conducción. Llevar a cabo la primera demostración pública en España por carreteras reales [...]
Proyecto ONDA-F
CSIC, Posicionamiento y mapas digitales, Sistemas de asistencia, Vehículo autónomo, Vehículo conectado
Gestión de una flota de vehículos de transporte discrecional en áreas dedicadas Duración: 01/2012 - 12/2014 Presupuesto: 107.000 € Objetivos: El objetivo principal del proyecto ONDA-F consistió en hacer una contribución significativa al desarrollo de servicios de transporte público con vehículos capaces [...]
Proyecto GUIADE
CSIC, Posicionamiento y mapas digitales, Sensores, Tráfico, Vehículo conectado
Guiado automático de vehículos de transporte público mediante percepción multimodal para mejorar la eficiencia Duración: 2008 - 2011 Presupuesto: 584.328 € Objetivos: El proyecto GUIADE tuvo como finalidad conseguir la automatización en el posicionamiento y guiado de vehículos de Transporte público, [...]
Proyecto iVANET
INSIA-UPM, Posicionamiento y mapas digitales, Sistemas de asistencia, Vehículo conectado
Comunicaciones en malla para vehículos e infraestructuras inteligentes Duración: Enero/2011 - Diciembre/2014 Presupuesto: Objetivos: El objetivo de este proyecto es el establecimiento de una arquitectura de comunicaciones que dé soporte al despliegue de algunas aplicaciones de sistemas cooperativos. Dentro de [...]