
Descripción de la entidad
| La Universidad Politécnica de la Región de Murcia, con sede en Cartagena y fundada en 1998, es una universidad pública especializada en ingeniería, arquitectura y empresa. Cuenta con tres campus urbanos, situados en el centro histórico de la ciudad, y con centros de investigación y emprendimiento en las localidades de Fuente Álamo y La Palma. Imparte una quincena de títulos de grado y una veintena de másteres a cerca de 7.000 estudiantes. Sus estudios se complementan con los de la Universidad de Murcia, con la que conforma el Campus de Excelencia Internacional Mare Nostrum. La UPCT forma también parte de la asociación UP4 junto a las politécnicas de Madrid, Catalunya y Valencia.
Dentro de la UPCT, forman parte de la Red de Vehículos Inteligentes, investigadores de los grupos División de Sistemas e Ingeniería Electrónica y Diseño Electrónico y Técnicas de Tratamiento de Señal, con las siguientes actividades transversales:
|
Principales actividades, medios y productos
Las principales líneas en el ámbito de los vehículos inteligentes son:
Los grupos de investigación involucrados cuentan con los siguientes medios materiales en el marco de los vehículos autónomos:
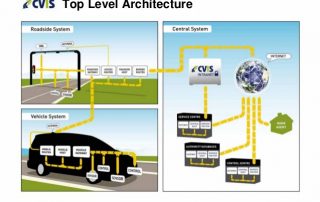
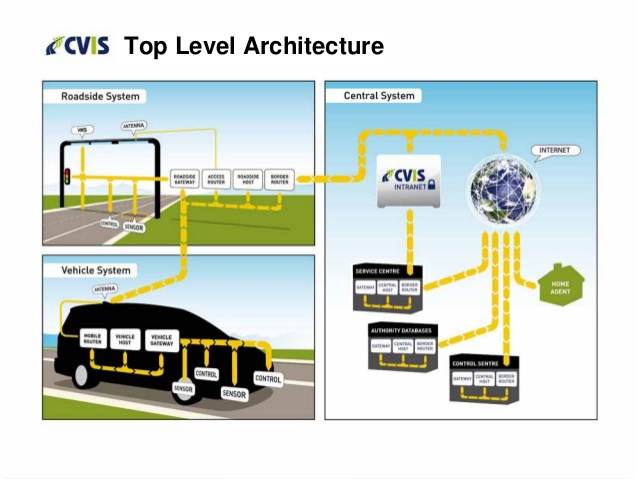
Se han desarrollado diferentes arquitecturas de bajo nivel que controlan los mandos de un vehículo que permite su interacción con otros sistemas de alto nivel que generan las órdenes pertinentes para:
|
- Vehículo eléctrico automatizado EZGO VEGO que dispone de:
- Control automático de los actuadores del vehículo mediante CAN-bus: acelerador, volante y freno.
- Equipos de posicionamiento GPS-IMU y laser Scanner 2D, controlados desde una arquitectura computacional de bajo nivel para el manejo de los actuadores y de alto nivel para el sistema de guiado autónomo.
- Controladora RT-cRIO.
- Capacidades de evitación de obstáculos y navegación
- Comunicaciones IEEE 802.11ac
- Vehículo eléctrico automatizado Renault Twizy con:
- Control automático de los actuadores del vehículo mediante CAN-bus: acelerador, volante y freno.
- Percepción mediante VPL16-Velodyne 3D laser Scanner y visión artificial.
- Sistema de reconocimiento de señales de tráfico
- Controladora RT-cRIO.
- Posicionamiento mediante GPS-IMU.
- Comunicaciones IEEE 802.11ac
- Vehículo eléctrico Renault ZOE que dispone de:
- Equipos informáticos, receptores GPS, tarjeta de lectura CAN.
- Percepción mediante HDL64SE-Velodyne 3D laser Scanner.
- Laboratorio de vehículos inteligentes y visión por computador con equipamiento para la instrumentación de vehículos y desarrollo de dispositivos electrónicos.
- Instrumentación para análisis de dinámica vehicular
- Plataforma giroscópica con GPS integrado (Crossbow)
- IMUs con GPS de bajo coste
- Cámaras de visión artificial: Lin-Log, multispaectral, IR y color.
- Sensores de percepción del entono
- 4 Escáners láser 2D SICK de differentes rangos.
- 2 Escáners láser 3D Velodyne VLP-16 y HDL 64SE
- Banco de prueba para baterías de coches eléctricos hasta 40 kW
Resultados
Una arquitectura para la gestión de información georreferenciada con integración de datos masivos: aplicaciones ITS.
Alumno: Cristina Sotomayor Martínez
Director: Rafael Toledo Moreo y Antonio Skarmeta Gómez
Fecha de defensa: 24 enero 2014
Calificación: Sobresaliente Cum Laude
- Carolina Piñana Rafael Toledo-Moreo, Antonio Gómez Skarmeta, David Bétaille, François Peyret. Título: Elevation-Enhanced-Map-based GPS Non-Line-Of-Sight Detection in Urban Environments. Tipo de participación: Ponencia. Congreso: 2012 IEEE Intelligent Vehicles Symposium Workshop on Navigation, Perception, Accurate Positioning and Mapping for Intelligent Vehicles. Publicación: Proceedings of the 2012 IEEE Intelligent Vehicles Symposium Workshops. ISBN: 978-84-695-3472-4. Lugar celebración: Alcalá de Henares, España Fecha: Junio 2011
- David López-Pérez, Rafael Toledo-Moreo. An Approach to Road Enhanced Maps in Urban Areas. 2012 IEEE Intelligent Vehicles Symposium Workshop on Navigation, Perception, Accurate Positioning and Mapping for Intelligent Vehicles. ISBN: 978-84-695-3472-4. Lugar celebración: Alcalá de Henares, España Fecha: Junio 2011
- Carolina Piñana, Rafael Toledo-Moreo, David Bétaille, Antonio Gómez Skarmeta. Título: GPS Multipath Detection and Exclusion with Elevation-Enhanced Maps. Tipo de participación: Ponencia. Congreso: 2011 14th International IEEE Conference on Intelligent Transportation Systems. 978-1-4577-2196-0/11/$26.00 ©2011 IEEE, pp. 19-24. Lugar celebración: Washington DC, EEUU Fecha: Octubre 2011
- Rafael Toledo-Moreo. Título: Why can’t road positioning and integrity be friends? Tipo de participación: Ponencia invitada. Congreso: 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems. Workshop on “Perception and Navigation for Autonomous Vehicles in Human Environment” Publicación: Proceedings of the workshop. Lugar celebración: San Francisco, EEUU Fecha: Septiembre 2011
- Rafael Toledo-Moreo, Dominique Gruyer, Alain Lambert. Título: A Theoretical Analysis of the Extended Kalman Filter for Data Fusion in Vehicular Positioning. Tipo de participación: Ponencia Congreso: International Conference on Intelligent Transportation Systems Telecommunications 2011. Publicación: 978-1-61284-670-5/11/$26.00 ©2011 IEEE. Lugar celebración: San Petersburgo, Rusia Fecha: Agosto 2011
- Rafael Toledo-Moreo, Jose Santa, M.A. Zamora, B. Úbeda, A.F. Skarmeta. Título: An Analysis of Navigation and Communication Aspects for GNSS-Based Electronic Fee Collection. Intelligent Transportation Systems World Congress. Publicación: Proceedings of the Conference. Lugar celebración: Busan, Corea Fecha: Octubre 2010
- Rafael Toledo-Moreo, B. Úbeda, Jose Santa, M.A. Zamora, A.F. Skarmeta. An Analysis of Positioning and Map-Matching Issues for GNSS-Based Road User Charging. IEEE- ITS Intelligent Transport Systems Society – ITSC 2010, Intelligent Transportation Systems Conference. Publicación: 978-972-8822-20-0. Lugar celebración: Madeira, Portugal. Fecha: Septiembre 2010
- Rafael Toledo-Moreo, Jose Santa, B. Úbeda, Carolina Piñana-Diaz, M.A. Zamora, A.F. Skarmeta. Performance Aspects of Navigation Systems for GNSS-Based Road User Charging
- IEEE- ION GNSS 2010 Conference. Lugar celebración: Portland, EEUU Fecha: Septiembre 2010
- Integrity Provision for Map-Matched Positioning of Road Vehicles at Lane Level. IEEE- ITS Intelligent Transport Systems Society – ITSC 2009, Intelligent Transportation Systems Conference Publicación: ISBN 978-1-4244-5520-1. pp 550-555. Lugar celebración: St Louis, EEUU Fecha: Octubre 2009
Francois Peyret, David Bétaille, Pinana Carolina, Rafael Toledo-Moreo, Antonio F. Gómez-Skarmeta, Miguel Ortiz, GNSS autonomous localization: Non-Line-Of-Sight satellite detection based on digital 3D maps of city environments, IEEE Robotics and Automation Magazine, Páginas, inicial: 57 final: 63 Vol 21, Issue 1. Fecha: Marzo 2014
C. Piñana-Díaz, R. Toledo-Moreo, Fco. Javier Toledo-Moreo, A. Skarmeta, A Two-Layers Based Approach of an Enhanced-Map for Urban Positioning Support, Sensors, Páginas, inicial: 14508 final: 14524 Fecha: Octubre 2012
M. Valdés-Vela, R. Toledo-Moreo, F. Terroso-Saenz, M.A. Zamora-Izquierdo, An Application of a Fuzzy Classifier Extracted from Data for Collision Avoidance Support in Road Vehicles, International Scientific Journal Engineering Applications of Artificial Intelligence, febrero 2012
F. Terroso-Saenz,M. Valdés-Vela, C. Sotomayor, R. Toledo-Moreo, A. Gomez-Skarmeta, A Cooperative Approach to Traffic Congestion Detection with Complex Event Processing and VANET, IEEE Intelligent Transportation Systems Transactions, Vol 26, issue 1 Páginas, inicial: 173 final:183 Fecha: enero 2012
Ana Toledo, Rafael Toledo-Moreo, José M. Cano, Miguel Pinzolas, Maneuver Prediction for Road Vehicles based on a Novel Neuro-fuzzy Dynamic Architecture, Robotics and Autonomous Systems, Volumen: 58, issue 12 Páginas, inicial: 1316 final:1320 Fecha: diciembre 2010.
David Bétaille, Rafael Toledo-Moreo, Creating Enhanced Maps for Lane Level Vehicle Navigation, IEEE Transactions on Intelligent Transportation Systems, Volumen: 11, N4 Páginas, inicial: 786 final: 798 Fecha: diciembre 2010.
Rafael Toledo-Moreo, Miguel A. Zamora, Collision Avoidance Support in Roads with Lateral and Longitudinal Maneuver Prediction by Fusing GPS/IMU and Digital Maps, Transportation Research Part C 18 (2010) Volumen: 18 Páginas, inicial: 611 final: 625 Fecha: enero 2010
Rafael Toledo Moreo, David Bétaille, Francois Peyret, Jean Laneurit, Fusing GNSS, Dead-reckoning and Enhanced Maps for Road Vehicle Lane-Level Navigation, IEEE Journal of Selected Topics In Signal Processing, Volumen: 3, N5 Páginas, inicial: 798 final:809 Fecha: octubre 2009
Rafael Toledo Moreo, David Bétaille, Francois Peyret, Lane Lane-Level Integrity Provision for Navigation and Map Matching With GNSS, Dead Reckoning, and Enhanced Maps, IEEE Transactions on Intelligent Transportation Systems, Volumen: 11,N1 Páginas, inicial: 100 final:112 Fecha: Marzo 2010
R. Toledo, MA. Zamora, B. Úbeda, A. Skarmeta, High Integrity IMM-EKF Based Road Vehicle Navigation with Low Cost GPS/INS, IEEE Transactions on Intelligent Transportation Systems, Volumen: 8, N3 Páginas, inicial: 491 final: 511 Fecha: Sep 2007
Antonio Martínez-Sánchez, Carlos Fernández, Pedro J. Navarro, Andrés Iborra (2011) A Novel Method to Increase LinLog CMOS Sensors’ Performance in High Dynamic Range Scenarios. Sensors. (11), pp. 8412-8429

{kind=link}
{kind=link}