Sistema de Activación de Medidas Pre-Colisión para Evitar Accidentes en Entornos Urbanos
Proyecto SEGVAUTO II
Factor humano y HMI, Posicionamiento y mapas digitales, Sensores, Sistemas de asistencia, UEM, Vehículo conectado
SEGVAUTO II Seguridad de Vehículos Automóviles Duración: 01/2010 - 12/2013 Presupuesto: Objetivos: El objetivo fundamental del programa es el diseño de sistemas para la seguridad en vehículos, incluyendo desde una metodología adecuada de recogida de datos, análisis y reconstrucción de [...]
Proyecto Hacia un Sistema de Transporte Inteligente en Urbanizaciones y Recintos Peatonales
Posicionamiento y mapas digitales, Sensores, Sistemas de asistencia, ULL, Vehículo autónomo
Hacia un Sistema de Transporte Inteligente en Urbanizaciones y Recintos Peatonales Duración: 01/2014 - 12/2016 Presupuesto: 60.500,00 € Objetivos: Se plantea la utilización del prototipo de vehículo eléctrico autónomo Verdino para su utilización en entornos nos estructurados como zonas peatonales con [...]
Proyecto Sistema Inteligente de Bajo Coste para el Transporte y la Vigilancia en Entornos Ecológicos no Estructurados
Posicionamiento y mapas digitales, Sensores, ULL, Vehículo autónomo, Vehículo conectado
Sistema Inteligente de Bajo Coste para el Transporte y la Vigilancia en Entornos Ecológicos no Estructurados Duración: 12/2007 - 09/2010 Presupuesto: 90.000,00 € Objetivos: Se plantea la construcción de un prototipo de vehículo autonomo para la circulación en entornos no estructurados, [...]
Proyecto Plataforma de bajo coste para la simulación a escala de vehículos eléctricos inteligentes y soluciones de sistema de transporte inteligente
Posicionamiento y mapas digitales, Sensores, Simulacion, ULPGC, Vehículo autónomo, Vehículo conectado
Plataforma de bajo coste para la simulación a escala de vehículos eléctricos inteligentes y soluciones de sistema de transporte inteligente Duración: 01/2010 - 12/2010 Presupuesto: 60.500,00 € Objetivos: Desarrollar una plataforma HW/SW escalando un vehículo eléctrico dotada de la electrónica y [...]
Proyecto PQN
Análisis de impactos, Factor humano y HMI, Sensores, Sistemas de asistencia, URJC, Vehículo autónomo
Pedestrians' Quality Needs Duración: 09/2006 - 11/2010 Presupuesto:
Proyecto CABINTEC
Análisis de impactos, Factor humano y HMI, Sensores, Sistemas de asistencia, URJC, Vehículo autónomo
Cabina Inteligente para el Transporte por Carretera Duración: 07/2007 - 06/2011 Presupuesto:
Proyecto ANTROPOMORFA
Factor humano y HMI, Sensores, Sistemas de asistencia, URJC, Vehículo autónomo
VISION ULTRA-RAPIDA POR EVENTOS Y SIN FOTOGRAMAS. APLICACIÓN A AUTOMOCION Y ROBOTICA COGNITIVA Duración: 01/2010 - 12/2012 Presupuesto:
Proyecto Invisum
Factor humano y HMI, Sensores, Sistemas de asistencia, URJC, Vehículo autónomo
Intelligent VIdeoSUrveillance SysteM Duración: 07/2014 - 12/2016 Presupuesto:
{kind=link}
{kind=link}
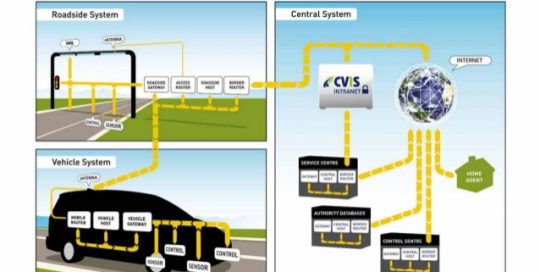
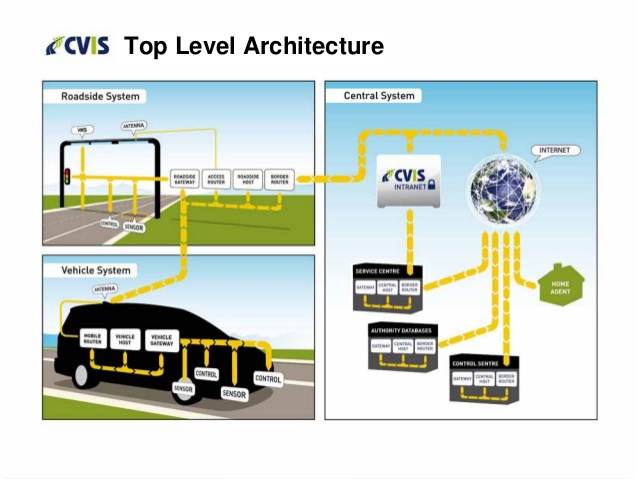
Proyecto CVIS
Sensores, Tráfico, UPCT, Vehículo conectado
Cooperative Vehicle Infrastructure Systems Duración: 01/2010 - 02/2016 Presupuesto: Objetivos: Cooperative Vehile Infrastructure Systems afrontaba la cooperación entre vehículos y con la insfraestructura Participantes: De la red, Rafael Toledo en el Laboratoire Central des Ponts et Chaussées (ahora IFSTTAR Institut [...]
Proyecto SiVeLAB
Bancos de pruebas para motores de vehículos térmicos / eléctricos, Sensores, Sistema de energía para vehículos eléctricos., Sistemas de asistencia, UPCT, Vehículo autónomo
Adquisición de Equipamiento Científico-tecnológico para el Laboratorio de Investigación en Sistemas para Vehículos. Duración: 06/2011 - 12/2014 Presupuesto: Objetivos: El objetivo del Proyecto SiVeLab fue dotar a la UPCT en Parque Tecnológico de Fuente Álamo de un espacio para la [...]
Proyecto ViSelTR
Algoritmos de visión por computador y aprendizaje automático., Posicionamiento y mapas digitales, Sensores, UPCT
Técnicas de visión selectiva en entornos no estructurados para aplicaciones con restricciones de tiempo real Duración: 01/2013 - 12/2016 Presupuesto: Objetivos: El objetivo del proyecto es dotar a sistemas de visión (SV) de capacidades para operar en ambientes no estructurados [...]